

 联系我们
联系我们

**部分:
使用RobotStudio离线编程功能可以大幅度降低喷涂程序开发时间和难度。下面介绍如何创建喷涂工作站。
1、打开RobotStudio软件。
2、点击新建“空工作站”。
3、从“机器人模型库”导入机器人,从“导入模型库”导入雾化器。

4、在“布局”中右键点击机器人,选择“设定位置”。输入现场机器人位置数据。

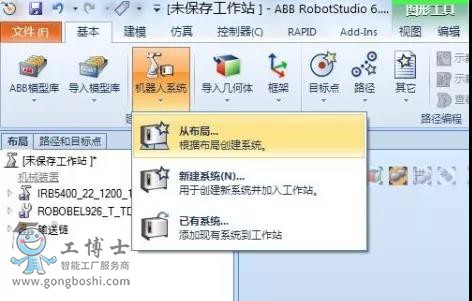
5、在“机器人系统”中选择“从布局”创建系统。选择Robotware版本。点击两个“下一个”到达下图位置。
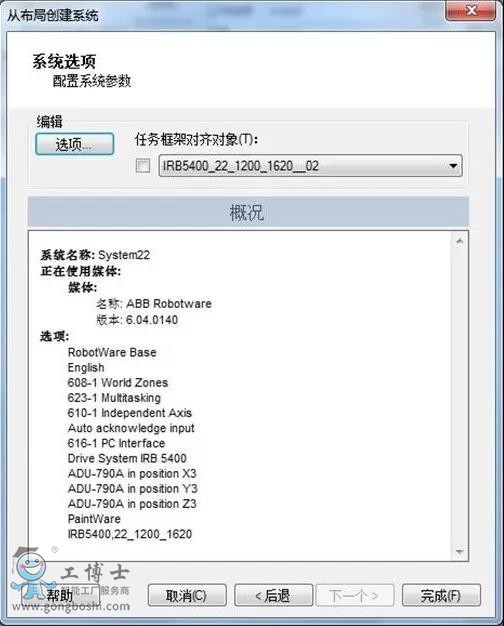
点击“选项”。
点击“MotionCoordination”
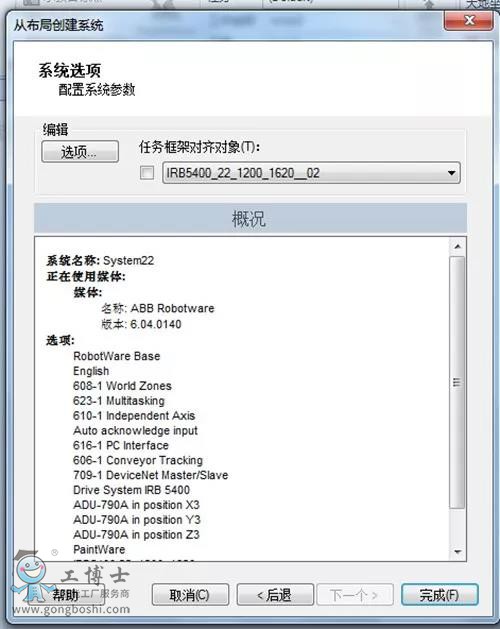
勾选“606-1conveyor Tracking”
选择“ConveyorTracking on PIB”
点击“确定”

点击“完成”。
第二部分来介绍创建输送链系统。
在“建模”菜单中选择建立一个固体,点击建立“球体”。
设置球体的半径。建议设置半径”50mm”。
点击“创建”,“关闭”。

在“建模”菜单中选择“创建输送带”。
传送带几何结构选择“部件_1”,就是刚刚建立的数模。
类型选择“线性”。
传送带长度根据实际情况填写。
“创建”。

右击输送链,选择“创建连接”。

根据现场数据设定以下数据。
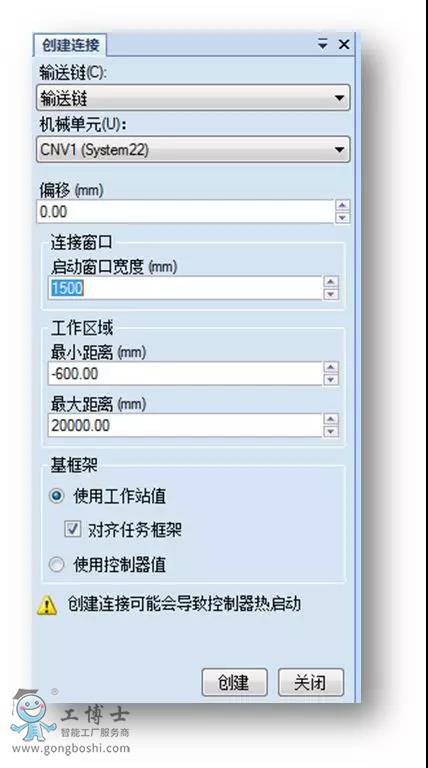
点击“创建”。
右键点击“输送链”,选择“运动”
根据现场情况设定链速。
第三部分在创建喷涂系统和输送链后可以导入需要喷涂的部件的数模,并安装到输送链中。
从“导入几何体”,“浏览几何体”导入数模

右击“对象源”,点击“添加对象”。
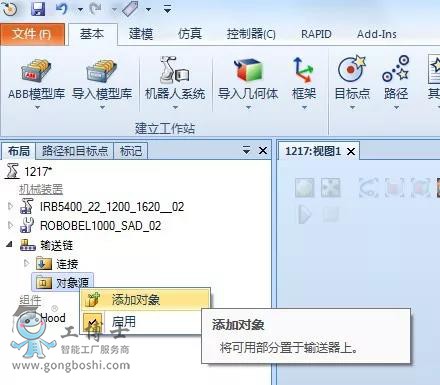
部件选择刚才导入的几何体。节距指前后两车相同部位的间距。

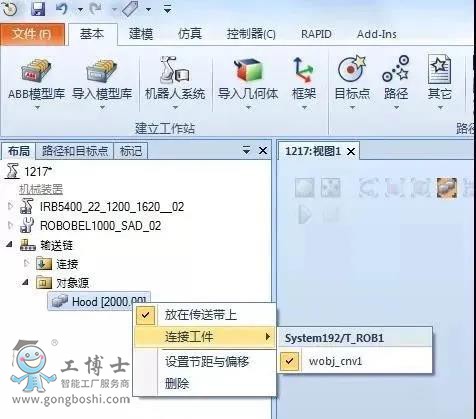
右击安装到输送链的部件。
点击“放在传送带上”。
点击连接工件里的工件坐标系“Wobj_cnv1”
右击输送链,选择“操纵”。可以通过拖动下图红框位置使安装在输送链上的部件在输送链上运动